Assignment 2: Mathematical Preliminaries#
Due Fri 5 September 2025 at the start of class
Important
These problems are all very well known. A quick search on the internet, using LLMs, or Wolfram Alpha will give you solutions. Unfortunately, by using these resources, you will learn very little.
You must be able to solve these problems without appealing to any outside resources.
For example: if you want to use the Euler–Maclaurin formula, then learn it well enough that you can derive it from scratch, and compute the Bernoulli numbers. Otherwise, you will not really be learning anything other than how to apply a formula someone else has developed.
This will be a critical skill as you move forward in your research and start tackling problems that are not common, and which have not been used to train LLMs, or coded into a system like Wolfram Alpha.
1. Partial Derivatives I#
Consider three variables \(x\), \(y\), and \(z\) related through the equation \(f(x, y, z) = 0\). Prove that
This relationship is often useful in thermodynamics, but it is easy to mistake the sign if you are not careful.
2. Integrals#
Compute the following integral:
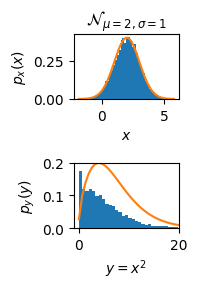
3. Delta Function#
Consider a random variable with a probability density function (PDF) \(p_x(x)\). Let \(y = x^2\). The PDF \(p_y(y)\) is given by
Compute this integral and determine \(p_y(y)\) in terms of the function \(p_x\).
4. Matrices#
For each of the following types of matrices,
Hermitian, Anti-hermitian, Unitary, Diagonal
state what this implies about:
The trace \(\Tr \mat{A}\).
The determinant \(\det \mat{A}\).
The adjoint \(\mat{A}^\dagger\)
The inverse \(\mat{A}^{-1}\).
A product of two such matrices \(\mat{A}\mat{B}\).
The eigenvalues and eigenvectors.
Example: Upper Triangular Matrix
For an upper triangular matrix:
Nothing is special about the trace.
The determinant is the product of the diagonals.
The adjoint is lower triangular.
The inverse is upper triangular.
The product is upper triangular.
The eigenvalues are the diagonal entries, and the eigenvectors can be organized into an upper triangular matrix.
Numerical example (not needed for your assignment):
5. Rotation Matrices#
The effect of rotations on physical systems can be expressed in terms of Lie algebras and groups as we will discuss later in the course. For now, find examples of three 2D and 3D matrices \(\mat{T}_{x,y,z}\) that satisfy the following commutation relationships:
Prove that the trace of any such matrices must be zero: \(\Tr\mat{T}_{i} = 0\). Show that if the matrices \(\mat{T}_{i}^\dagger = \pm\mat{T}_{i}\) are either hermitian or anti-hermitian, then they must be anti-hermitian: \(\mat{T}_{i}^\dagger = -\mat{T}_{i}\).
Can the matrices \(\mat{T}_{i}\) be real in 3D? What about 2D? Justify your answer.
Physicists typically include a factor of \(\I = \sqrt{-1}\) in the definition of the commutation relations, so you will often see
Show how \(\mat{M}_{i}\) can be obtained from \(\mat{T}_{i}\).
Note
Armed with such matrices, one can form matrices that effect rotations on on spinors (2D) and vectors (3D) by exponentiating:
The linear combinations of \(\mat{T}_{i}\) form a representation of the Lie algebra \(\mathfrak{so}(3)\) and exponentiating these gives the rotation matrices, which form a representation of the corresponding Lie group \(SO(3)\). In the case of the 2D representation, this is related to the Lie group \(SU(2)\) (but the topology of these two groups differ as we will discuss later).