Rotations#
Here we discuss the structure of rotations in 2D and 3D. In 3D, we shall represent these matrices as
corresponding to the 3D matrix that actively rotates vectors about the axis defined by \(\vect{\theta}\) in a right-handed sense, rotating through a total angle of \(\theta = \norm{\vect{\theta}}\). The set of all rotation matrices \(\{\mat{R}_{\vect{\theta}}\mid \vect{\theta}\in \mathbb{R}^3\}\) with matrix multiplication as the binary operation form a Lie group, and the set of all exponents \(\{\mat{\vect{\theta}\times}\mid \vect{\theta}\in \mathbb{R}^3\}\) forms the corresponding Lie algebra.
Warmup: Rotations in 2D#
To better understand rotations, we start from 2D. Let \(\mat{R}_{\theta}\) be the matrix that effects an active counter-clockwise rotation through angle \(\theta\). This must take
Hence, we must have
The set of all such matrices corresponds to the group \(SO(2)\) of special orthogonal matrices in 2D.
From the Assignment 1: Mathematical Preliminaries we saw that this can be obtained by exponentiating another matrix
Note that each matrix \(\mat{R}_{\theta}\) can be fully described by the angle \(\theta \in [0, 2\pi)\). Thus, the structure of the group of rotations is isomorphic to a circle which we can describe as the set \(\{e^{\I\theta} \mid \theta \in [0, 2\pi)\}\). This corresponds to the group \(U(1)\) of unitary matrices in 1D. Thus \(SO(2) \cong U(1)\): the to groups are isomorphic, meaning there is a one-to-one relationship between the two that preserves the group structure.
The corresponding Lie algebra consists of the matrices \(\{\theta \mat{T} \mid \theta \in \mathbb{R}\}\) where
The structure of this algebra \(\mathfrak{so}(2)\) is that of the real line \(\mathcal{R}\). Note that it is isomorphic to the algebra \(\mathfrak{u}(1)\) corresponding to \(U(1)\) with \(\mat{T} \equiv \I\) playing the role of the imaginary number.
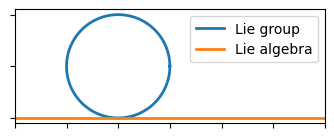
The geometry of this is shown in the figure to the right: the group is a circle, but locally at the identity, it looks like a straight line. More generally, note that locally at every point it looks like a straight line. The structure of the algebra describes the structure of the tangent space at all points of the group. Note that exponentiating points in the algebra give us the group, which, in this case, is compact.
3D Rotations#
Generalizing to 3D we have, for rotations in the \(x\)-\(y\) plane:
You should be able to convince yourself that rotations in the \(y\)-\(z\) and \(z\)-\(x\) planes have the following form:
More generally, we can rotate about any vector \(\vect{\theta}\) by exponentiating
If you compute the three matrices \(\mat{T}_i\), you will find that they satisfy the following commutation relations
or more compactly, using the Levi-Civita symbol
It turns out that, to rotate any physical object, one needs to find appropriate matrices that satisfy this relationship. Once you find these, you can determine how the object rotates.
In Assignment 2: Mathematical Preliminaries, you are asked to find a set of 2D and 3D matrices that satisfy this relationship. Exponentiating the 2D matrices will tell you how 2-component objects called spinors (spin 1/2) or qubits transform under rotations. The 3D matrices correspond to the rotations shown here.
Note the structure here: each element \(\mat{R}_{\vect{\theta}}\) of the group \(SO(3)\) can be described uniquely by the vector \(\vect{\theta} \in \mathbb{R}^3\) with lengths \(\theta \in [0, 2\pi)\). This is a solid sphere or radius \(2\pi\) with the outer shell identified with the point at the origin \(\vect{\theta} = \vect{0}\). While this embedding in \(\mathbb{R}^3\) gives the appropriate topology of \(SO(3)\), it does not give an accurate representation of the structure. Locally, every point in this group looks like \(\mathbb{R}^3\) – a real three-dimensional vector space spanned by the three basis “vectors” – the matrices \(\mat{T}_{x,y,z}\), which are called the generators.
To see the relevance of the commutation relations, let’s look at rotations through small angles:
Consider what happens when we combine two rotations:
In general, the relationship between \(\vect{\theta}\) and the original rotations \(\vect{\phi}\) and \(\vect{\varphi}\) is quite complicated, but if the angles are small, we can use the Bake-Campbell-Hausdorff formula:
where all further terms contain nested commutators. In order for the group to be closes, we ensure that all terms on the right lie in the algebra. Thus, the generators must be closed under commutation:
so that
Note that the product of the matrices need not lie in the algebra: it only needs to be closed under commutation. For the rotation group \(SO(3)\), we have \(f_{ijk} = -\varepsilon_{ijk}\), and so
Quantum Mechanics#
You will learn in classical mechanics that there is a deep connection through Noether’s theorem between continuous symmetries – like time-translation invariance, translation invariance, and rotational invariance – and conservation laws:
Time translation invariance implies conservation of energy. (Actually conserved hamiltonian, but this is usually the energy.)
Space translation invariance implies conservation of momentum.
Rotational invariance implies conservation of angular momentum.
These are codified in quantum mechanics as follows:
The operators corresponding to the conserved quantities form a basis for the Lie algebra, and exponential to effect the transformations of the Lie group on the wavefunction.
\[\begin{align*} \renewcommand{\op}[1]{\hat{\mathbf{#1}}} \braket{\vect{x}|e^{\vect{\lambda}\vect{\op{p}}/\I\hbar}|\psi} &= \psi(\vect{x}-\vect{\lambda}),\\ \braket{\vect{x}|e^{\vect{\theta}\cdot\vect{\op{L}}/\I\hbar}|\psi} &= \psi\bigl(\mat{R}^{-1}_{\vect{\theta}}\vect{x}\bigr),\\ e^{t\op{H}/\I\hbar}\ket{\psi(t_0)} &= \ket{\psi(t_0 + t)}. \end{align*}\]
Space Translations#
We start with translation and conservation of momentum in one dimension. Elements of the algebra have the form \(\lambda \op{p}\), which effect translations as
In other words, we say that \(\op{p}/\I\hbar\) generates translations of the wavefunction to the right.
To see this, note that the momentum operator behaves like
thus, expanding the exponential, we recognize the Maclaurin series expansion of \(\psi(x-\lambda)\) about \(x\):
Everything works in higher dimensions
Rotations#
The angular momentum operator is
Expanding as before, we have