Assignment 5: ODEs#
Due Mon 29 Sept 2025 at the start of class
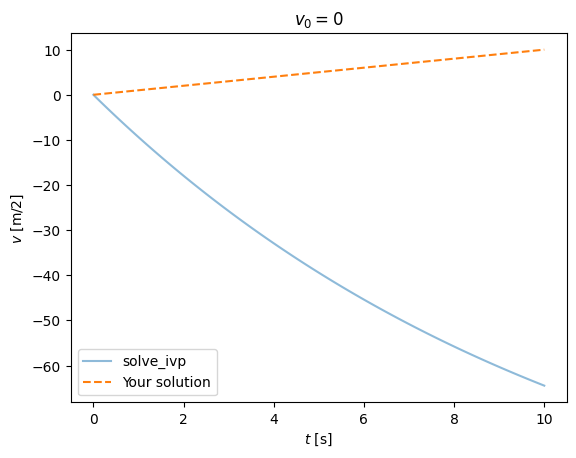
1. Terminal Velocity#
Solve for the motion of a projectile fired vertically with initial velocity \(v(0) = 0\): i.e. dropped from a helicopter. Assume that the drag force is \(F_d = -bv\) so that one has the following differential equation:
What do you expect the solution to be at large times (i.e. what is the terminal velocity). Check your answer, then check it numerically by comparing with the following code on CoCalc.
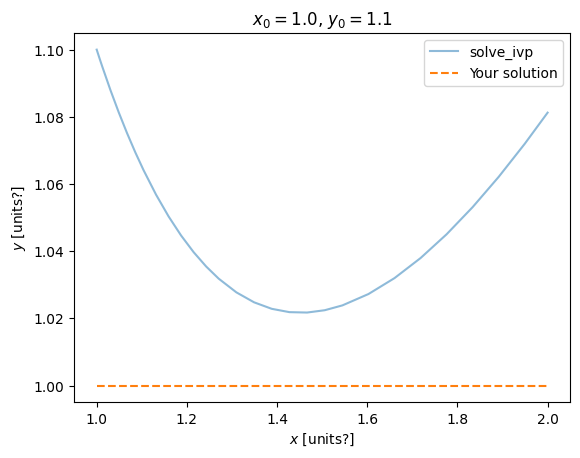
2. An Isobaric ODE.#
Solve the following ODE:
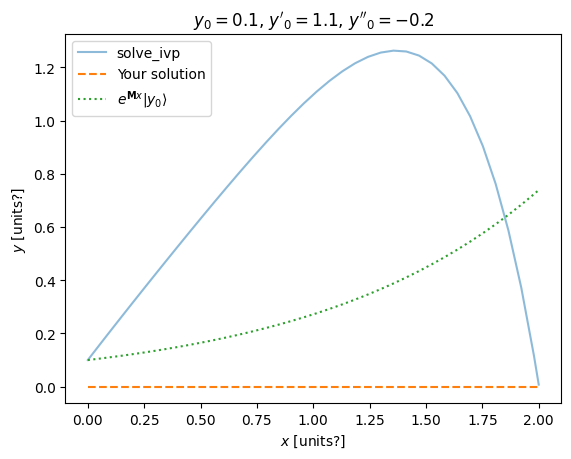
3. Linear Homogeneous ODE with Constant Coefficients#
Find the general solution to the following ODE. Write the solution in forms that are entirely real (i.e., that contain no complex quantities.)
Explain how to write the equation and your solution as a first-order equation in the
form \(\partial_x\ket{y} = \mat{M}\ket{y}\). Check your solution numerically by using
solve_ivp and by using expm to exponentiate the matrix.
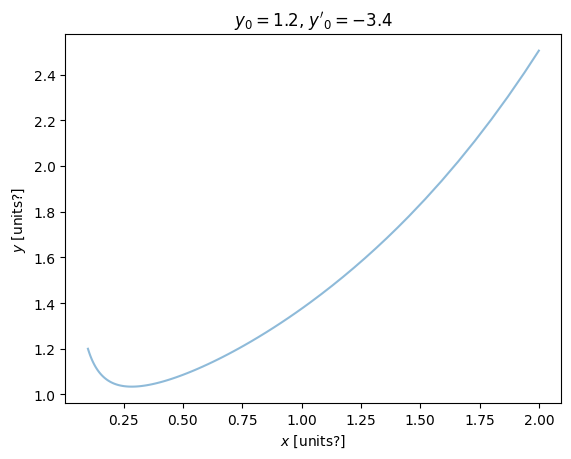
4. Series Solutions 1#
Obtain two series solutions of the confluent hypergeometric equation:
Test your solutions for convergence.
5. Variational Approximation#
Given a self-adjoint operator \(\op{H}\) with a bounded spectrum \(E_0 \leq E_n\), use the fact that the eigenfunctions \(\op{H}\ket{n} = \ket{n}E_n\) form a complete basis to prove the variation method or variational theorem:
I.e., we can find an upper bound on the lowest eigenvalue \(E_0\) by guessing a trial function \(\ket{\psi}\) and minimizing over the parameters.
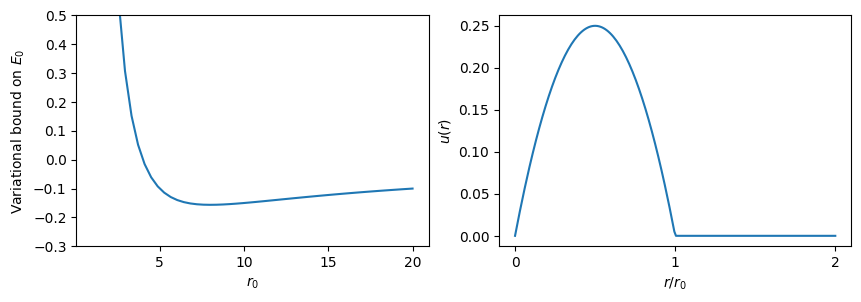
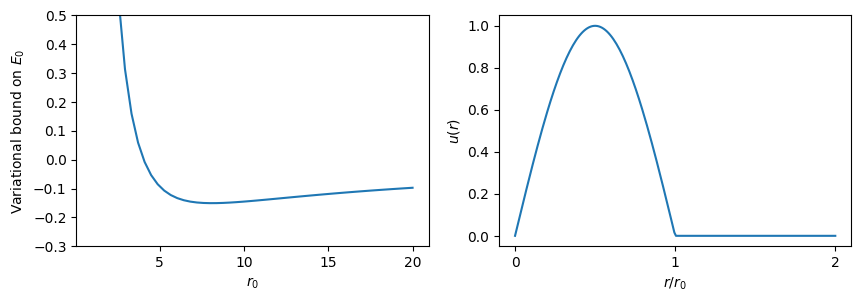
Apply this to provide a bound for the ground state of hydrogen by guessing a form for the radial wavefunction \(u(r)\) for \(r\in[0, \infty]\) which goes to zero at \(r=0\) and \(r=\infty\).
I.e., guess something reasonable for \(u(r)\) with one or more parameters, and minimize
Hint.
If you don’t have a better idea, you could try a parabola:
The numerical results are below for you to check your work.
E ≤ -0.15625
Note
A few of notes.
We have integrated by parts here to write
\[\begin{gather*} \int_0^{\infty}\d{r}\;\Bigl(-u^*(r)u''(r)\Bigr) = \int_0^{\infty}\d{r}\;\abs{u'(r)}^2. \end{gather*}\]The boundary terms vanish since \(u(0) = u(\infty) = 0\).
We have chosen units so that \(\hbar^2/2\mu = e^2/4\pi\epsilon_0 = 1\) where \(\mu = m_em_p/(m_e+m_p)\) is the reduced mass. This means that your energy will be expressed in units of the following:
\[\begin{gather*} 1 = \overbrace{\underbrace{ \frac{\hbar^2}{2\mu}\frac{4\pi\epsilon_0}{e^2} }_{\text{distance}}}^{\approx 0.2647\text{Å}\atop \approx 2.647\times 10^{-11}\text{m}} = \overbrace{\underbrace{ \frac{2\mu}{\hbar^2}\left(\frac{e^2}{4\pi\epsilon_0}\right)^2 }_{\text{energy}}}^{\approx 54.38\text{eV} \atop \approx 8.715\times 10^{-18}\text{J}} \end{gather*}\]Thus, multiply your numerical bound by \(54.38\,\)eV to check.
This equation comes from noting that the ground state has zero angular momentum \(l=0\), so the wavefunction can be written
\[\begin{gather*} \psi(\vect{x}) = Y^{0}_{0}(\theta, \phi)\psi_0(r), \qquad \psi_0(r) = \frac{u_0(r)}{r}, \end{gather*}\]where \(\vect{x}\) is the vector separating the electron and proton, and \(\psi_{0}(r) = ru_0(r)\) is the radial wavefunction which satisfies:
\[\begin{gather*} \left(-\frac{1}{r^2}\pdiff{}{r}\left(r^2 \pdiff{}{r}\right) - \frac{1}{r}\right)\psi_0(r) = E_0\psi_0(r) \end{gather*}\]after setting our units.
Note that, in spherical coordinates, we should integrate with the metric \(4\pi r^2 \d{r}\). The normalization would thus be:
\[\begin{gather*} 1 = \int_0^{\infty} 4\pi r^2\d{r}\; \abs{\psi_0(r)}^2 = \int_0^{\infty} 4\pi r^2\d{r}\; \frac{\abs{u(r)}^2}{r^2} = 4\pi \int_0^{\infty} \d{r}\; \abs{u(r)}^2. \end{gather*}\]The factor of \(4\pi\) will cancel from the numerator and denominator in the variational bound, and so we are able to neglect it.
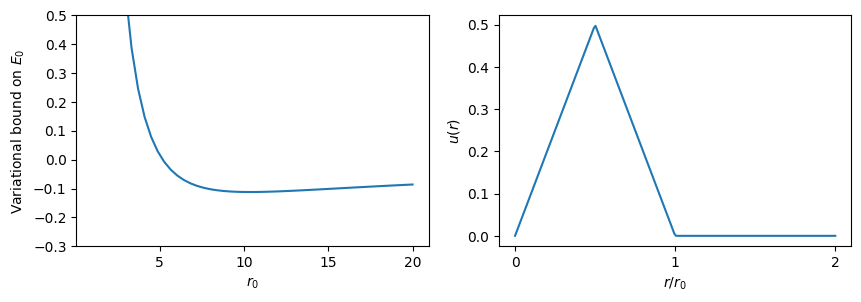
You might consider simpler trial functions, but be sure they do not have discontinuities. For example, the function
\[\begin{gather*} u(r) = \begin{cases} r & r < r_0\\ 0 & r > r_0 \end{cases} \end{gather*}\]seems to work, and gives a nice “bound” if you make a mistake and forget the fact that \(u'(r)\) has a delta function at \(r=r_0\). If you include this delta function, you get the rather unhelpful bound \(E\leq\infty\).